Úvod
V tomto článku představím piezoelektrický jev, zmíním se o nejčastěji používaných piezomateriálech a stručně popíšu jejich výrobu. V druhé polovině článku vysvětlím matematické rovnice popisující piezoelektrický jev.
Co to je piezoelektrický jev?
Piezoelektrický jev je vlastnost materiálů reagovat na mechanické působení (deformaci) vytvořením elektrického náboje na svém povrchu. Tento jev se projevuje u některých krystalických materiálů, tzv. feroelektrik. Feroelektrika se skládají ze spontánně polarizovaných domén elektrických dipólů. Tyto dipóly jsou spojeny s krystalovou mřížkou materiálu. Dojde-li k deformaci mřížky, dojde také ke změně ve spontánní polarizaci a tím k vytvoření náboje na povrchu materiálu.
 |
| Obrázek 1 - Polarizovaná a nepolarizovaná krystalická mřížka, zdroj |
Piezoelektrický jev se projevuje i opačným směrem. Přivedením napětí na elektrody připevněné k piezomateriálu dojde k mechanické deformaci. Přivedené napětí (el. pole) způsobí, že spontánně polarizované domény materiálu mají tendenci se "narovnat", tedy přizpůsobit směr vektoru polarizace vektoru intenzity el. pole. A vzhledem k propojení dipólů, které tuto polarizaci vytvářejí, s krystalovou mřížkou, dojde k mechanické deformaci materiálu. Právě opačný piezoelektrický jev se využívá v piezo motorech/aktuátorech.
Materiály
Nejznámějším a nejběžnějším přírodním materiálem, který má piezoelektrické vlastnosti, je křemen. V praxi se ovšem používají uměle vyrobené materiály, které mají lepší vlastnosti. Nejznámějším z nich je PZT (angl. lead zirconium titanate). Výsledná PZT keramika vzniká smícháním potřebných kovů v práškové podobě a jejich následným zahřátím. Po přidání organického pojiva je hmota vytvarována do požadovaných tvarů (disků, prutů atp.) a následně zahřáta, dokud v materiálu nevznikne krystalická struktura. Nakonec je keramika vystavena silnému elektrickému poli při zahřátí na teplotu těsně pod hranicí Curieho teploty. Tímto dojde k nasměrování jednotlivých domén elektrických dipólů ve směru působení elektrického pole. Po vyjmutí z elektrického pole zůstane v materiálu remanentní polarizace. Tento proces s v angl. označuje "poling". Na obrázek 1 se můžeme podívat jako na krystalickou mřížku PZT před tímto procesem v levé části a po něm v části pravé. Ve skutečnosti obrázek 1 ukazuje, co udělá s krystalickou mřížkou zahřátí nad Curieho teplotu (Tc) - jakákoli polarizace se ztratí.
Matematický popis
Existují 4 způsoby zápisu piezoelektrických rovnic. Liší se použitím různých piezoelektrických konstant a vyjádřenými veličinami. Nejčastěji se používají první dvě formy.
1) Relativní prodloužení a náboj (strain-charge form)
\[S_p=s_{pq}^{E}\sigma_q+d_{kp}^tE_k\]
\[D_i=d_{iq}\sigma_q+\varepsilon_{ik}^{\sigma}E_k\]
2) Relativní prodloužení a napětí (strain-voltage form)
\[S_p=s_{pq}^{D}\sigma_q+g_{kp}^tD_k\]
\[E_i=-g_{iq}\sigma_q+\beta_{ik}^{\sigma}D_k\]
3) Mechanické napětí a náboj (stress-charge form)
\[\sigma_p=c_{pq}^{E}S_q-e_{kp}^tE_k\]
\[D_i=e_{iq}S_q+\varepsilon_{ik}^SD_k\]
4) Mechanické a napětí a el. pole (napětí) (stress-voltage form)
\[\sigma_p=c_{pq}^{D}S_q-h_{kp}^tD_k\]
\[E_i=-h_{iq}S_q+\beta_{ik}^SD_k\]
platí \(p,q=1,2,3\) a \(i,k,l=1,2,..,6\), kde 1 až 3 značí souřadné osy a 4 až 6 rotace kolem souřadných os 1 až 3, viz. obrázek 2.
 |
| Obrázek 2 - označení os ve zjednodušené notaci, zdroj [1] |
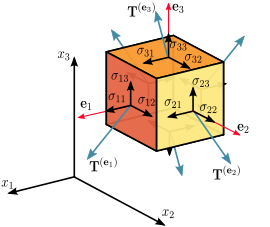 |
| Obrázek 3 - tenzor napětí na obj. elementu tvaru krychle, zdroj |
Toto značení os odpovídá zjednodušenému zápisu Cauchyho tenzoru napětí.
\[\sigma_{ij}=\left[{\begin{matrix}\sigma _{11} & \sigma _{12} & \sigma _{13} \\\sigma _{21} & \sigma _{22} & \sigma _{23} \\\sigma _{31} & \sigma _{32} & \sigma _{33} \\\end{matrix}}\right]\]
Tento tenzor má 9 prvků (tenzor 2. řádu), ale vzhledem k jeho symetrii se tento počet redukuje na 6 unikátních prvků.
\[\begin{bmatrix}\sigma_1 & \sigma_2 & \sigma_3 & \sigma_4 & \sigma_5 & \sigma_6 \end{bmatrix} \equiv \begin{bmatrix}\sigma_{11} & \sigma_{22} & \sigma_{33} & \sigma_{23} & \sigma_{31} & \sigma_{12} \end{bmatrix}\,\!\]
Tenzor napětí je svázán s tenzorem malých deformací \(\epsilon_{k\ell}\)zobecněným Hookovým zákonem
\[\sigma_{ij}=\displaystyle\sum\limits_{k=1}^3\displaystyle\sum\limits_{\ell=1}^3c_{ijk\ell}~\epsilon_{k\ell}\]
kde \(c_{ijk\ell}\) je tenzor elastických koeficientů (angl. stiffnes tensor, elasticity tensor) (\(N/m^2\))
Pro opačné vyjádření platí
\[\epsilon_{ij}=\displaystyle\sum\limits_{k=1}^3\displaystyle\sum\limits_{\ell=1}^3s_{ijk\ell}~\sigma_{k\ell}\]
kde \(s_{ijk\ell}\) je tenzor poddajnosti (angl. compliance tensor) (\(m^2/N\))
Oba tyto tenzory jsou ve výše uvedených formách převedeny do zjednodušené notace \(ij\rightarrow p\)
\(k\ell\rightarrow q\).
\(E_i\) je vektor intenzity elektrického pole (\(V/m\))
\(D_i\) je vektor elektrické indukce (\(C/m^2\))
\(S_p\) je vektor relativního prodloužení (\(m/m\)),
\(\sigma_p\) je vektor napětí (ve zjednodušené notaci, viz. výše) (\(N/m^2\))
\(\epsilon_{ik}\) je matice permitivit (\(F/m\)) a \(\beta_{ik}\) je k ní inverzní (\(m/F\)).
Piezoelektrické konstanty
1) \(d_{kp}\), matice 3x6, (\(C/N=m/V\))
\[d_{kp} = \left ( \frac{\partial D_k}{\partial T_p} \right )^E = \left ( \frac{\partial S_p}{\partial E_k} \right )^T \]
2) \(g_{kp}\), matice 3x6, (\(Vm/N=m^2/C\))
\[g_{kp} = -\left ( \frac{\partial E_k}{\partial T_p} \right )^D = \left ( \frac{\partial S_p}{\partial D_k} \right )^T\]
3) \(e_{kp}\), matice 3x6, (\(C/m^2\))
\[e_{kp} = \left ( \frac{\partial D_k}{\partial S_p} \right )^E = -\left ( \frac{\partial T_p}{\partial E_k} \right )^S\]
4) \(h_{kp}\), matice 3x6, (\(V/m=N/C\))
\[h_{kp} = -\left ( \frac{\partial E_k}{\partial S_p} \right )^D = -\left ( \frac{\partial T_p}{\partial D_k} \right )^S\]
Horní indexy \(D\), \(E\), \(S\) a \(\sigma\) znamenají, že daná veličina je konstantní, \(s_{pq}^{E}\) tedy značí tenzor poddajnosti při konstantním elektrickém poli. \(t\) značí transpozici.
Vlastnosti piezoelektrických materiálů popisuje také tzv. coupling factor (coupling coefficient). Ten je definován jako odmocnina z podílu výsledné mechanické energie a aplikované elektrické energie, či naopak jako odmocnina z podílu výsledné elektrické energie a aplikované mechanické energie. Vyjadřuje tedy efektivitu převodu energie.
Na závěr přikládám odkaz na stránky firmy PI [6], kde tento výrobce piezoelektroniky uvádí jednotlivé parametry vyráběné keramiky, a to včetně piezoelektrických konstant.
Odkazy a zdroje
[2] Bednařík, Michal. Fyzika 1. České vysoké učení technické, 2011.










































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}